Ride System Interactions
01
Rider to
smartphone
02
Rider to
vehicle
03
Rider to
teleoperator
04
Teleoperator
to vehicle
Error
Site designed and built by David Power ✌️

At Voyage's R&D hub, I worked alongside engineers to design and test various parts of the ride system, from the ride hailing process, to on-ride customer interaction and remote operator control. I was also involved in desiging protocols/procedures for vehicle and hardware testing, as well as test data collection and analysis.
01
Rider to
smartphone
02
Rider to
vehicle
03
Rider to
teleoperator
04
Teleoperator
to vehicle
While there are many similarities between an autonomous ride service and traditional ride-sharing platforms, the absense of a human driver creates a range of new challenges. Making the trip request and pickup process as frictionless as possible is critical without the fallback of direct rider/driver communication.

The ride experience in an autonomous vehicle is inherintely passive, but the rider still holds authority over the trip. Many users report some level of hesitency about relinquishing driving responsibility to a machine, so giving them a sense of control over when to start, where to go, and (if needed) when to stop goes a long way towards establishing trust and product adoption.
Having daily access to residents of The Vilages gave us ample opportunity to conduct user research and gather feedback on our concepts as we flushed out the features of the rider control system.

In the event that a rider feels they need to stop the ride for any reason, they can direct the car to do so. If they need help, they can communicate with a remote teleoperator via onboard cameras and microphones.
Through our research we understood that physical buttons were often preferred to touch screen interfaces. Basic user-actionable functions are printed in large text on large buttons and accompined by braile for the visually-impaired.

Despite advancements in autonomous driving technology, there are still some edge case scenarios that require human input, like unexpected road construction or crowded parking lots. In order to facilitate a quick transition to vehicles with no driver, we developed a teleoperations platform which allows a remote operator to quickly and safely resolve any ride issues. This can range from simple tasks like approving route changes or identifying objects in the roadway, to full vehicle takeovers enabling dynamic driving operations.
The teleassist pod is outfitted with seating and controls identical to those found in Voyage's Chrysler Pacifica vans housed on a robust, heavy chassis. This familar feel lets operators immediately leverage their experience driving the real-life vans so they can focus on making quick decisions and operating safely. A curved front/side camera display and rear-view mirror display furter immereses the operator into the scene. To the left a large touch display presents actionable prompts and autonomy commands.

Our initial functioning prototype utilized various configurations of steering and pedal controls made for racing simulators/video games, paired with an ultra-wide monitor streaming live camera feeds from around the car. Through countless hours of live testing and studying user behaviors, we indentified a critical shortcoming in the setup - it just didn't feel "real" enough. The disconnect between controlling a big and heavy moving vehicle and driving one from afar with toy-like controls was significant. It was clear that a proper teleassist experience had to more closely mimic that of real life driving.

The vehicle command screen gives the teleoperator control over vehicle behavior. It allows them to review route or motion plan changes, instruct the vehicle to stop or pull over, and take over complete control of the vehicle when needed. Teleassistance can be requested by the passenger or by the vehicle itself.
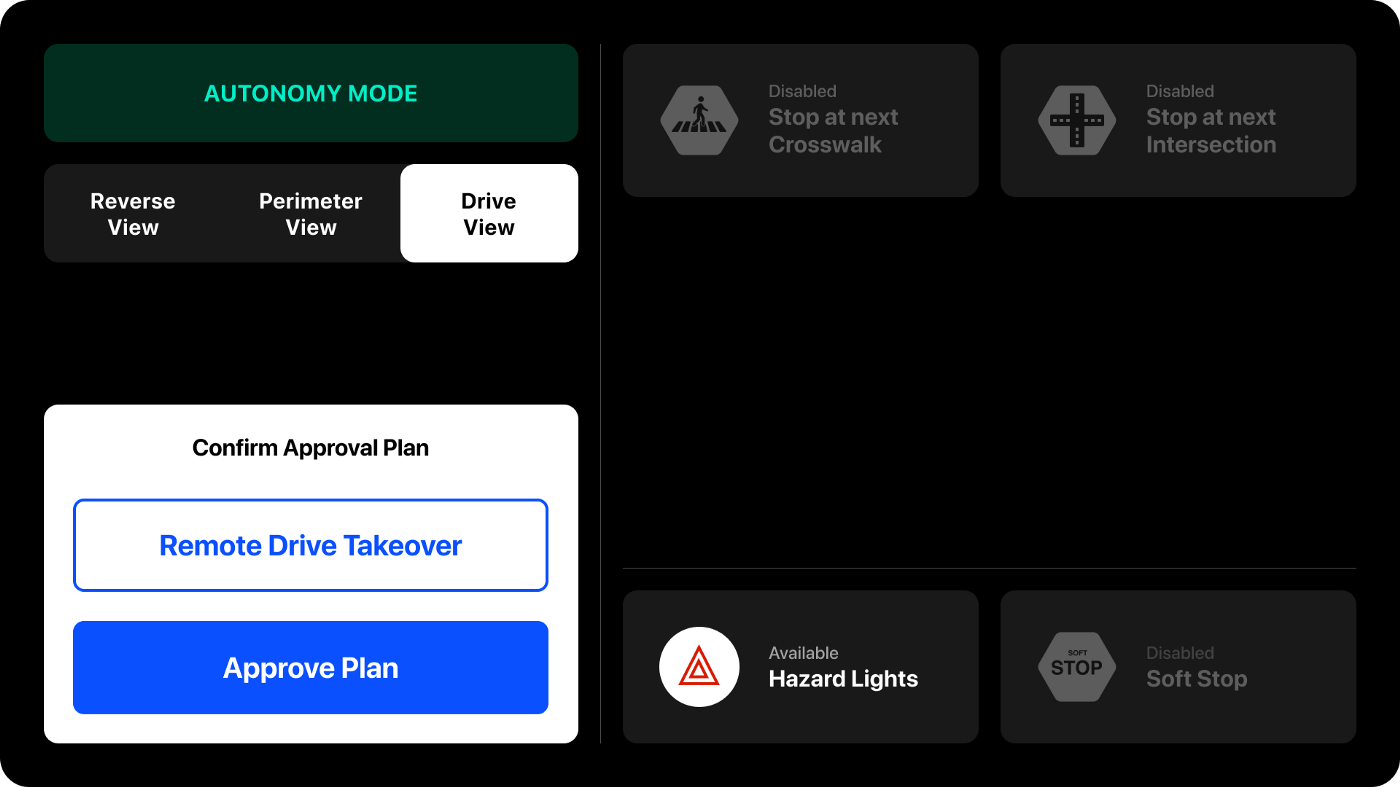
In this example, the vehicle comes upon a narrow street with other cars illegally parked on both sides of the road. The vehicle identifies this as a potentially hazardous situation and comes to a gentle stop while pinging a teleoperator for help. A teleoperator briefly takes control to navigate past the hazard. Once clear, the vehicle re-enters autonomous mode and continues the ride.